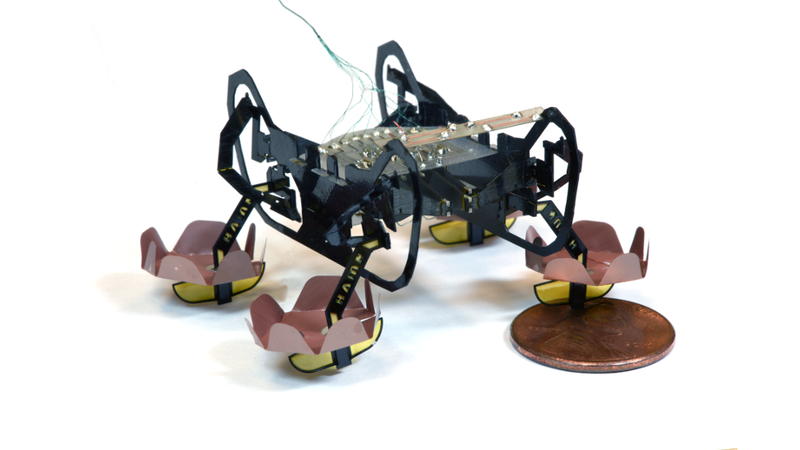
 Harvard ‘ s Ambulante Microrobot (HAMR)Afbeelding: Yufeng Chen, Neel Doshi, en Benjamin Goldberg/Harvard University
Harvard ‘ s Ambulante Microrobot (HAMR)Afbeelding: Yufeng Chen, Neel Doshi, en Benjamin Goldberg/Harvard University
Geïnspireerd door bugs, Harvard Ambulante Microrobot, of HAMR, kunnen rennen, klimmen, scherpe bochten maken, en kleine ladingen. In de nieuwste upgrade van het systeem, HAMR is begiftigd met het vermogen om te zwemmen, duiken onder het oppervlak, en lopen onderwater—geen geringe opgave voor een object zo licht als een paperclip.
Roboticists aan de Harvard John A. Paulson School of Engineering and Applied Sciences (ZEEËN) hebt toegevoegd tweaks te HAMR, waardoor het zwemmen aan de oppervlakte van het water, breekt de oppervlaktespanning en wastafel, en lopen onder water. Dit microbot, met een gewicht van slechts 1.65 gram en geschikt voor het dragen van 1,44 gram van de lading, nu kunt verkennen, zowel terrestrische als aquatische milieus. Uiteindelijk, HAMR gebruikt kan worden als een scout in het zoek-en reddingsoperaties, of voor het onderzoeken van gevaarlijke of moeilijk bereikbare omgevingen. Deze gegevens van dit onderzoek kan nu worden gevonden in de wetenschappelijke tijdschrift Nature.
Om HAMR zwemmen, de makers voorzien van multifunctionele footpads, waardoor de oppervlaktespanning als de bot peddels in het water. De vier paren van asymmetrische flappen laat het peddelen op het oppervlak, vooruit en draaien, en met een zwembad, een gang die doet denken aan een het duiken kever.
Maar zwemmen is eenvoudig; voor HAMR de ontwikkelaars, de echte uitdaging was het vinden van een manier voor de microbot om de overgang van een water skimmer naar een onderwater walker. Het probleem heeft te maken met oppervlaktespanning, en de moeilijkheid in het krijgen van een lichte object te doorboren door het water oppervlak.
“HAMR de grootte van de sleutel is om haar prestaties,” zei Neel Doshi, een graduate student aan ZEE en co-auteur van het papier. “Als het nog veel groter, het moeilijk zou zijn voor de ondersteuning van de robot met de oppervlaktespanning en als het nog veel kleiner, de robot misschien niet in staat om genoeg kracht te breken.”
Voor een oplossing, de Harvard-onderzoekers zich tot de kracht van kleinschalige natuurkunde, en een concept dat bekend staat als electrowetting. Bij een hoge spanning wordt toegepast op HAMR is footpads, de hoek van het contact met de bodem is veranderd, waardoor het makkelijker voor het bot te breken in het water. Deze schok kunt HAMR door de mazen van het oppervlak en zinken naar de bodem. De machine maakt gebruik van dezelfde wandelen stijl als op het droge, zodat het behoud van de mobiliteit. Om te voorkomen dat de elektrische componenten van kortsluiting onderwater, HAMR is bedekt met Parylene, een milieuvriendelijke polymeer.
Een voortdurende uitdaging, echter, is het krijgen van HAMR uit het water. Voor een object zo licht als deze de oppervlaktespanning kan intens zijn, als het twee keer het gewicht van de robot. Wat meer is, het enorme koppel uitgeoefend tijdens een exit poging veroorzaakt wrijving op de achterste benen. Om dit op te lossen, de ZEEËN onderzoekers verstijfd HAMR de transmissie en toegevoegd zachte pads aan de voorzijde benen. Dit verhoogde de machine de capaciteit en herverdeeld wrijving tijdens het klimmen. Met deze extra tweaks, HAMR was in staat om te lopen op een helling van een ontsnapping uit de aquatische grenzen.
Vooruitblikkend, de onderzoekers zou graag een manier vinden om HAMR uit het water zonder het voordeel van een oprit, en dergelijke luxe niet altijd beschikbaar in real-world instellingen. Maar ze hebben al een paar ideeën, zoals het geven van het gekko-achtige lijm op de voeten, of het hebben van het afsluiten van het water met schokkerige springen bewegingen. Wordt vervolgd!
[Natuur]