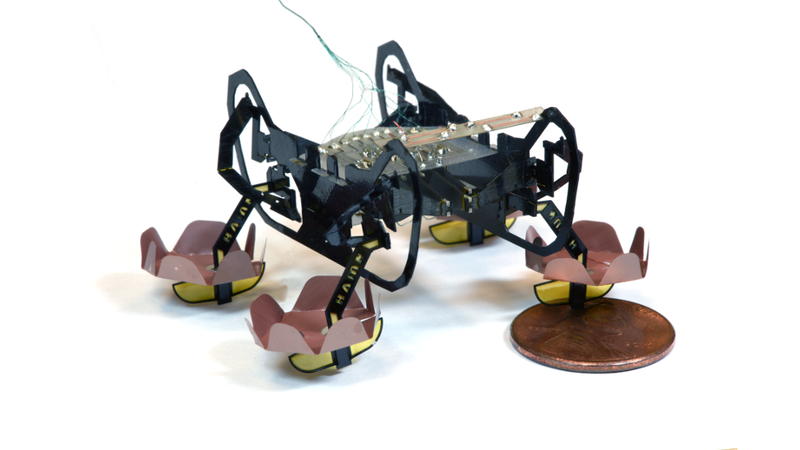
 Havard s Ambulant Microrobot (HAMR)Billede: Yufeng Chen, Neel Doshi, og Benjamin Goldberg/Harvard University
Havard s Ambulant Microrobot (HAMR)Billede: Yufeng Chen, Neel Doshi, og Benjamin Goldberg/Harvard University
Inspireret af bugs, Harvard Ambulant Microrobot, eller HAMR, kan løbe, klatre, lave skarpe sving, og udføre små nyttelast. I den seneste opgradering af systemet, HAMR er blevet udstyret med evnen til at svømme, dykke ned fra overfladen, og gå under vandet—ikke nogen lille opgave for et objekt som lys, som en papirclips.
Roboticists på Harvard John A. Paulson School of Engineering og Applied Sciences (HAV) har tilføjet tweaks til HAMR, som gør det muligt at svømme på overfladen af vandet, bryde overfladespændingen og håndvask, og gå under vandet. Dette microbot, vejer kun 1.65 gram og i stand til at gennemføre 1.44 gram gods, kan nu undersøge både terrestriske og akvatiske miljøer. I sidste ende, HAMR, der kan bruges som en spejder i eftersøgnings-og redningsoperationer, eller for at undersøge farligt eller svært tilgængelige miljøer. Dette detaljer af denne forskning kan nu findes i det videnskabelige tidsskrift Nature.
For at gøre HAMR svømme, dens skabere, forudsat at det med multifunktionelle footpads, så overfladespænding som bot padler over vandet. Dens fire par af asymmetrisk flapper giver den mulighed for at padle på den overflade, der bevæger sig fremad og dreje, og med en swimming gangart, der minder om en dykning beetle.
Men svømning er nemt for HAMR ‘ s udviklere, den virkelige udfordring var at finde en måde for microbot at overgangen fra vand skummer at en undersøisk walker. Problemet har at gøre med overfladespænding, og det er vanskeligt at få sådan et lys objekt til at trænge igennem vandoverfladen.
“HAMR størrelse er nøglen til dens ydeevne,” siger Neel Doshi, en ph.d. – studerende ved HAV og co-forfatter af papiret. “Hvis det var meget større, ville det være udfordrende at støtte robot med overfladespænding, og hvis det var meget mindre, robotten kan ikke være i stand til at generere nok kraft til at bryde det.”
For en løsning, Harvard forskere, der henvendte sig til den strøm af små-skala fysik, og et koncept, kendt som electrowetting. Når en høj spænding er anvendt til at HAMR er footpads, vinklen af kontakt til overfladen er ændret, hvilket gør det lettere for bot til at bryde vandoverfladen. Dette ryk lader HAMR glide gennem overfladen og synke til bunds. Maskinen bruger den samme walking style, som det gør på land, så det bevarer sin mobilitet. For at forhindre, at den elektriske komponenter fra bøjlerne under vandet, HAMR er belagt i Parylen, en miljøvenlig polymer.
En løbende udfordring, men bliver HAMR ud af vandet. For et objekt, som det er let som dette, overfladespænding, kan være intens, da det er to gange vægten af robotten. Hvad mere er, den enorme drejningsmoment, der udøves under en exit forsøg forårsager friktion på bagbenene. For at løse dette, HAVENE forskere stivnet HAMR transmissions-og tilføjet bløde puder til dens forreste ben. Denne øgede maskinens belastning og omfordeles friktion under klatring. Med disse ekstra tweaks, HAMR var i stand til at gå op ad en rampe, en flugt fra sin akvatiske rammerne.
Vendes blikket fremad, vil forskerne gerne vil finde en måde at få HAMR ud af vandet uden gavn af en rampe, og en sådan luksus vil ikke altid være til rådighed i den virkelige verden indstillinger. Men de har allerede fået et par ideer, som giver det gecko-som lim på sine fødder, eller har det exit vandet med jerky hoppe bevægelser. Fortsættes!
[Naturen]