Franske forskere har skabt en robot, der kan navigere uden GPS. I stedet, det kopierer “navigation system” desert myrer ved hjælp af optiske kompas, der er følsomme for polariseret lys og UV-stråling. Robotten AntBot, der er beskrevet i artikel i tidsskriftet Science Robotteknologi. Pressemeddelelse af udviklingen portal offentliggjort EurekAlert!

Forskere har længe bemærket, at ørkenen myrer søger føde er i stand til at overvinde et par hundrede meter, og derefter vende tilbage i en lige linje tilbage til sit hus af den korteste vej, uanset om de er flyttet til dette tilfældigt. Deres enestående navigations-talent bygger på to elementer: mulighed for at beregne den tilbagelagte distance og fremgangsmåde, der er angivet hastighed i forhold til Solen og biologiske “sky kompas”, der svarer til polariseret lys af himlen på jorden.
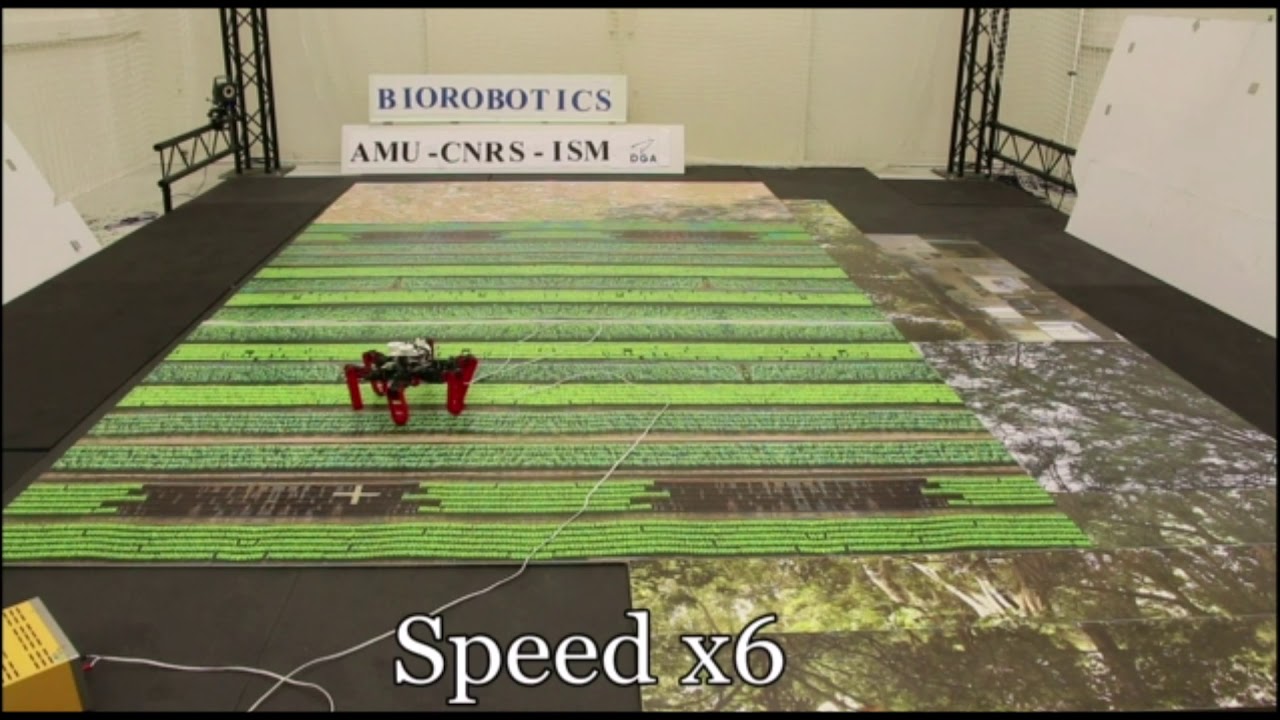
Udviklet af forskere på det nationale center for videnskabelig forskning af Frankrig (CNRS) og University of AIX-Marseille (AMU) AntBot robot, som vejer 2,3 kg, det bruger de samme metoder. Det er udstyret med seks ben for bedre mobilitet (kan bevæge sig gennem vanskeligt terræn, for eksempel, hvor der ikke vil robotter og droner), der er udstyret med en række sensorer, hvis data behandles af en single-Board computer, Raspberry Pi.

Som en sol kompas, maskinen bruger et par af ultraviolet detektorer, og polarisatorer, rotation, som giver mulighed for at måle fordelingen af polarisering af det indfaldende lys på himlen, som giver mulighed for at bestemme retningen af bevægelsen. Hertil kommer, at robotten har sensoren af det optiske flow. Den består af to rækker af seks sekskantede pixels. På grund af forsinkelsen af udseendet af billedet på to tilstødende pixel, kan sensoren beregne optiske flow.
Ved hjælp af disse enheder AntBot, ligesom ørkenen myrer, er i stand til at udforske miljøet og for at vende tilbage uafhængigt af hinanden til sin base med en nøjagtighed på en centimeter.

Da udvikling er en prototype, det har nogle begrænsninger. Forfatterne siger, at i forsøget bilen har kun omkring 14 meter, derfor, disse resultater er vanskelige at sammenligne med effektiviteten af bevægelse af fast myrer. I betragtning af den størrelse, hastighed og distance, robotten skal passere omkring 30 km for at sammenligne resultater med rigtige myrer. Så før du ser det potentielle omfang, det er nødvendigt for at opnå større mobilitet, forfatterne tilføje.
Til at diskutere udviklingen i vores Telegram chat.