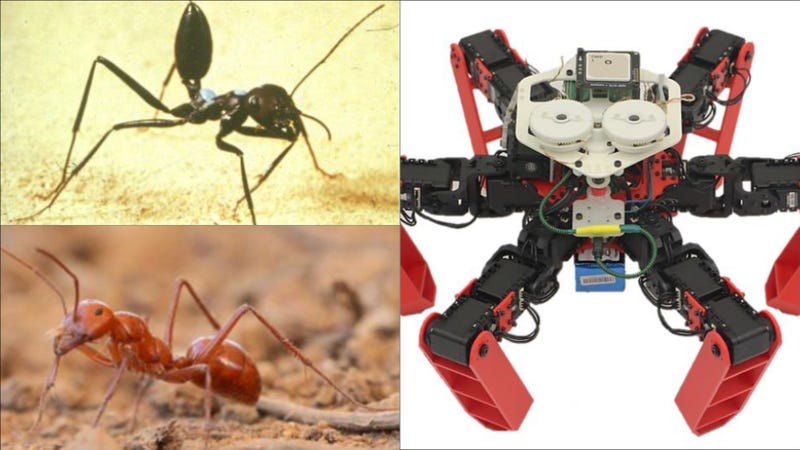
 Øverst til venstre, en Cataglyphis ørkenen ant; nederst til venstre, den Australske ørken ant Melophorus bagoti; ret, AntBot.Billede: Dupeyroux, et al (Videnskab Robotteknologi)
Øverst til venstre, en Cataglyphis ørkenen ant; nederst til venstre, den Australske ørken ant Melophorus bagoti; ret, AntBot.Billede: Dupeyroux, et al (Videnskab Robotteknologi)
Forskere i Frankrig ringer til deres seks-benede skabelse “AntBot.” Dette 9-tommer robotten ikke bare skitter rundt som i en ørken, ant, men—det låner også deres unikke navigatør færdigheder.
Disse kompetencer, der præsenteres i en ny undersøgelse offentliggjort i Science Robotteknologi på onsdag, kan måske en dag give robotter til at finde deres vej hjem uden brug af konventionelle tracking teknikker som GPS.
Insekt eller spindlere-baserede robotter er ikke ligefrem en ny ting. Benede robotter, som modsætning til dem, på hjul, er bedre til at kører ru terræn. Men forskerne bag AntBot, baseret på Aix-Marseille Universitet i den Sydlige del af Frankrig, sig til to meget forskellige arter af fouragerings-ant til inspiration i deres design: Cataglyphis fortis af Sahara og Melophorus bagoti af det Centrale Australien.
 Den AntBot i sin fulde herlighed.Foto: Dupeyroux, et al (Videnskab Robotteknologi)
Den AntBot i sin fulde herlighed.Foto: Dupeyroux, et al (Videnskab Robotteknologi)Ifølge hovedforfatteren Julien Dupeyroux, en ingeniør og Ph.d. – studerende i Biorobotics på Aix-Marseille, ørken myrer rejse store afstande i deres søgen efter føde, men de kan ikke bruge deres lugtesans til at vende hjem, takket være den brændende miljøer, de lever i. Men de har fundet måder at kompensere.
“Det vigtigste er, at ørkenen myrer kan ikke henvise til feromon-spor til at finde deres vej, som molekyler, der er faldet på jorden, ville øjeblikkeligt blive ødelagt af den ekstreme varme,” sagde Dupeyroux, og tilføjer, at udendørs temperaturer kan køre højt som 150 grader Fahrenheit i løbet af de myrer, fødesøgningsområde ture. “Hele deres udvikling, ørken myrer som Cataglyphis har udviklet sensoriske modaliteter for at gøre dem i stand til at lokalisere med hensyn til deres rede indgang.”
Med andre ord, myrer bruge en række tricks for at hjælpe dem med at finde ud af, og huske, hvor deres boliger er i forhold til deres nuværende placering—en evne forskere kalder sti integration (når folk gør det, det hedder dead reckoning).
Myrer ” sammensatte øjne, for eksempel, indeholder unikke fotoreceptorer, der fanger ultraviolet lys fra Solen, der er blevet polariseret af spredte luft molekyler. Dette mønster af UV-lys, men ændringer, som solen bevæger sig over himlen. Ved at spore disse skiftende mønstre, myrerne har primært en intern, himmelske kompas, der giver dem mulighed for at bestemme, hvilken retning, de står overfor. Den samme teknik kan endda have været brugt af Viking sejlere i havet for at navigere på overskyede dage.
De kan også spore, hvor hurtigt jorden ser ud til at bevæge sig på tværs af deres øjne, der er kendt som optisk flow (næste gang du sidder i en bil eller på cykel, for eksempel, lige meget opmærksomme på, hvordan verden ser ud til at være bevæger sig forbi dig—det er optiske flow). Optiske flow, sammen med myrer’ bevidsthed om, hvor mange skridt de har taget under en gåtur, der giver dem mulighed for at vurdere, hvor langt de har kørt. Sæt det sammen med det himmelske kompas, og du har fået en levende, åndende homing enhed med seks ben.
Dupeyroux og hans team ophævet disse tricks, sammen med myrer’ strut, for at skabe 3D-printet, Raspberry Pi-led, fuldt autonome AntBot. Så de sendte bot ud til tilfældigt at gå rundt, for en kort stund i en række forskellige miljøer, før du stiller det til at vende hjem.
Den AntBot var anstændig nok til at finde den hurtigste vej hjem ved hjælp af blot én eller to af de myrer’ tricks, men når alle tre blev kombineret, det var næsten fejlfri.
Resultaterne tyder på, at den AntBot ikke ligefrem “tror”, ganske som en myre i en del, fordi vi ikke fuldt ud forstår, hvordan ørkenen myrer bruge alle deres navigations-cues. Men næsten perfekt udførelse af AntBot er stadig imponerende, Dupeyroux sagde, især da det blev gjort med en forholdsvis billig teknologi og materialer.
Oprindeligt er han skønnede, at det kunne have kostet over $85,000 til at oprette en bot med en række sensorer, der efterlignede de ant ‘ s sammensatte øjne helt. Men bot mindre komplekse sensorer, der stadig var i stand til at replikere den unikke fotoreceptorer, der anvendes til den himmelske kompas; de hjalp også med at køre ned af de endelige omkostninger ved design og produktion af de AntBot til omkring $500.
“Vi viste, at vores løsning er biologisk plausibelt, og at det har fremragende resultater, så godt.” sagde han.
Navigations-knowhow, der vises af AntBot kan en dag blive sat til god brug af teknologier ligesom sidste kilometer levering droner eller smart-biler, Dupeyroux sagde. Ideelt set, er disse robotter vil bruge en kombination af forskellige metoder til at navigere på egen hånd, herunder GPS. Men AntBot pose tricks kan give nogle fordele i forhold til eksisterende metoder i visse situationer.
“Selv om GPS’ en har en stor indflydelse i den globale navigation, der lider af flere grænser,” Dupeyroux sagde. Disse omfatter signal fejl, når omkring høje bygninger; et relativt lille område af nøjagtighed til mindre enheder som smartphones, og ikke er særlig god på overskyet, regnvejr, eller sne dage. Den AntBot og robotter, som det burde, i det mindste i teorien, være i stand til at omgå disse begrænsninger.
For nu, men der er stadig masser af arbejde, der skal gøres i en forbedring af robotten.
“Vi ønsker, at vores robot til at gå videre til navigation. I sin nuværende form, er det kun navigerer for små afstande,” Dupeyroux sagde. På grund af den lille, let overophedede motorer, der anvendes til at hjælpe det med at flytte og rotere, sammen med sin begrænsede strømforsyning, AntBot kan kun navigere 15 m (49 fod) på en gang. “Vi arbejder i øjeblikket på en ny aktivering for at gøre vores robot i stand til at udføre 100-meter-lange baner i den virkelige verden betingelser.”
Holdet har også planer om at opgradere nøjagtigheden af bot ‘ s celestial kompas, samt dens regnekraft.
[Videnskab Robotteknologi]
Dele Denne Historie