 Havard der Ambulanten Microrobot (HAMR)Bild: Yufeng Chen, Neel Doshi, und Benjamin Goldberg/Harvard University
Havard der Ambulanten Microrobot (HAMR)Bild: Yufeng Chen, Neel Doshi, und Benjamin Goldberg/Harvard University
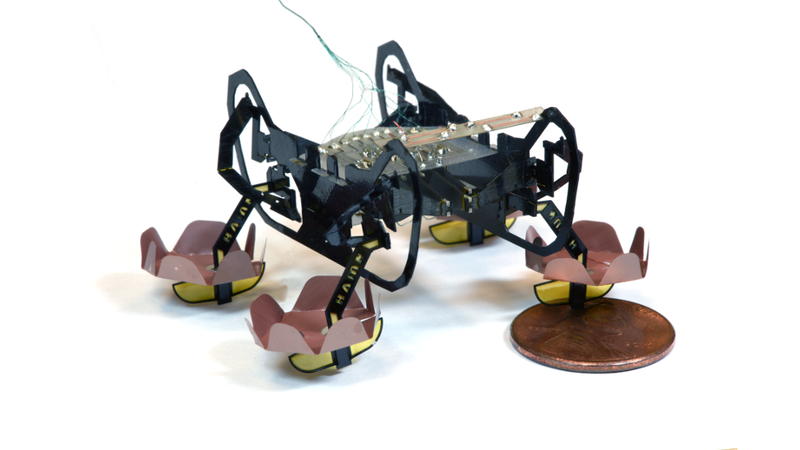
Inspiriert von bugs, Harvard Ambulante Microrobot, oder HAMR, kann laufen, klettern, scharfe Kurven, und tragen kleine Nutzlasten. In der neuesten upgrade der system -, HAMR wurde, ausgestattet mit der Fähigkeit, zu schwimmen, zu Tauchen von der Oberfläche und Unterwasser-Spaziergang—keine kleine Aufgabe für ein Objekt, das so leicht wie eine Büroklammer.
Gibt auch Robotiker an der Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) haben Hinzugefügt tweaks, um HAMR, welches es ermöglicht schwimmen auf der Oberfläche des Wassers, brechen die Oberflächenspannung und Waschbecken, und zu Fuß unter Wasser. Diese microbot, Wiegen eine bloße 1.65 Gramm und in der Lage trägt 1.44 Gramm Ladung, können Sie jetzt erkunden die beiden terrestrischen und aquatischen Umgebungen. Schließlich, HAMR kann verwendet werden als ein scout auf der Suche und Rettung Operationen, oder für die Untersuchung von gefährlichen oder schwer erreichbaren Umgebungen. Diese details dieser Forschung kann nun in der Fachzeitschrift Nature.
Um HAMR schwimmen, seine Schöpfer mit Multifunktions-fussplatte, sodass Oberflächenspannung wie der bot Paddel über das Wasser. Seine vier paar asymmetrische klappen können Sie paddeln an der Oberfläche, bewegt sich vorwärts und drehte sich um, und mit einem swimming-Gang erinnert an einen diving beetle.
Aber schwimmen ist einfach; für die HAMR-Entwickler, die eigentliche Herausforderung Bestand darin, eine Möglichkeit für die microbot, um den übergang von einer Wasser-skimmer, um ein Unterwasser-walker. Das problem hat damit zu tun, Oberflächenspannung, und die Schwierigkeit, solch ein Licht-Objekt zu durchbrechen die Wasseroberfläche.
“HAMR Größe ist der Schlüssel zu seiner Leistung”, sagte Neel Doshi, ein student an der SEE und co-Autor des Papiers. “Wenn es viel größer wird, würde es schwierig sein, die Unterstützung der Roboter mit der Oberflächenspannung und wenn es waren viel kleiner, der Roboter möglicherweise nicht in der Lage erzeugen genug Kraft, um Sie zu brechen.”
Für eine Lösung, die Harvard-Forscher wandte sich an die Kraft der kleinen-Skala Physik, und ein Konzept, bekannt als electrowetting. Wenn eine hohe Spannung zu HAMR die fussplatte, den Kontaktwinkel der Oberfläche verändert, wodurch es einfacher für den bot zu brechen die Wasser-Oberfläche. Dieser Ruck lässt HAMR slip über die Oberfläche und sinken zu Boden. Die Maschine verwendet die gleiche Fuß-Stil, wie es auf das trockene land, so behält es seine Mobilität. Um zu verhindern, dass seine elektrischen Komponenten vor Kurzschlüssen Unterwasser, HAMR ist beschichtet in Parylenebeschichtung, einem umweltfreundlichen polymer.
Eine ständige Herausforderung dar, jedoch ist immer HAMR aus dem Wasser. Für ein Objekt als Licht, als diese, die Oberflächenspannung intensiv sein kann, wie es ist zweimal das Gewicht des Roboters. Was mehr ist, ist das enorme Drehmoment ausgeübt wird, während einer Ausfahrt Versuch, die Ursachen der Reibung auf die Hinterbeine. Um dies zu beheben, die MEERE Forscher versteift HAMR übertragung und zusätzlichen weichen pads auf seine Vorderbeine. Dies erhöht die Maschine die Traglast und verteilt die Reibung beim klettern. Mit diesen zusätzlichen Verbesserungen, HAMR in der Lage war zu Fuß eine Rampe, die eine Flucht aus seiner aquatischen Grenzen.
Blick in die Zukunft, die Forscher würden gerne einen Weg finden, um HAMR aus dem Wasser, ohne den Vorteil einer Rampe, und solch ein Luxus nicht immer verfügbar in der realen Welt Einstellungen. Aber Sie habe schon ein paar Ideen, wie die Erteilung von it-gecko-wie Klebstoffe auf die Füße, oder beenden Sie das Wasser mit ruckartigen springen Bewegungen. Fortsetzung folgt!
[Natur]