
Moderne Roboter auf zwei Beinen schon ganz gut können, das Gleichgewicht zu halten beim gehen. Aber dies gilt nur für glatte Oberflächen. Bei Vorhandensein von Unebenheiten zweibeinige Roboter beginnen zu stolpern und zu fallen, und selbst die moderne Stabilisierungssysteme Sie nicht immer retten. Aber die Forscher von der technischen Universität in Guangdong (China) fanden eine sehr elegante Lösung der oben beschriebenen Probleme. Sie entscheiden, Propeller auf den Beinen Roboter, die helfen, das Gleichgewicht zu halten, auch in den schwierigen Bedingungen.
Roboter mit Propellern erhielt den Namen Jet-HR1, und die primäre Funktion der Rotoren, die Zusicherung der Entwickler, ist eine teilweise Kompensation der Verschiebung des Schwerpunkts, was können Roboter machen Recht weite Schritte ohne Chance auf die Seite fallen. Der Roboter Jet-HR1 hat eine Höhe von 65 Zentimetern und einem Gewicht von 6,5 Kilogramm, wobei jeder Propeller ist in der Lage, heben Sie das Gewicht bis zu 2 Kilogramm, was zusammen mit dem System der Stabilisierung der sehr gute Ergebnisse liefert.
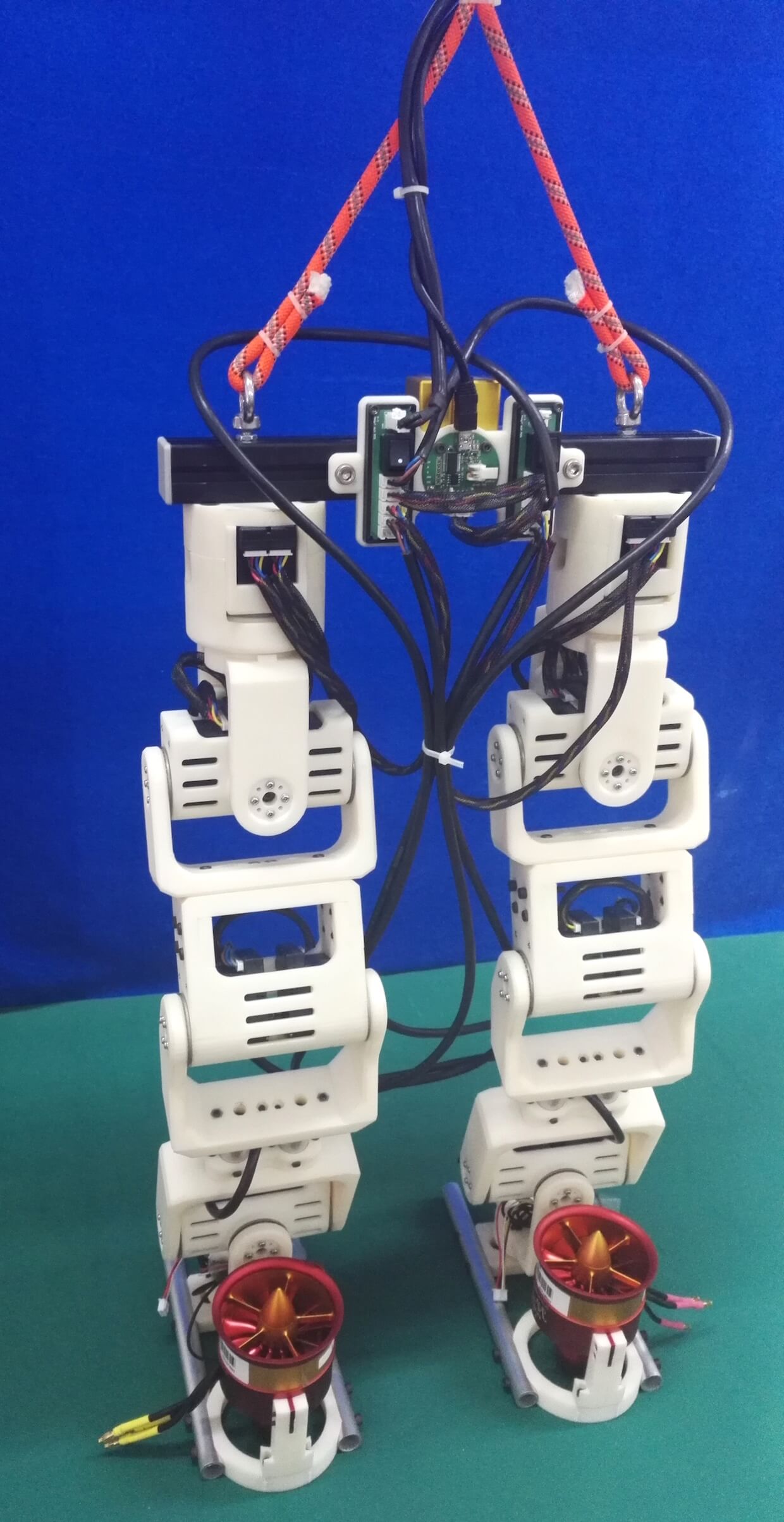
In einer Reihe von Experimenten Roboter trat über das Hindernis eine Breite von 37 Zentimeter, was einem Anteil von 80 Prozent von der maximal möglichen Länge des Schrittes des Roboters. Beim gehen jeden Propeller beschleunigt auf Höchstgeschwindigkeit, halten Sie das Bein in einer vertikalen Position und nicht geben einen Roboter gefüllt werden. Der Lüfter auf die «Rückseite» der Fuß, der hinten bleibt, während Sie zu Fuß, dreht sich in die entgegengesetzte Richtung, drückend Jet-HR1 an der Erde und bietet dadurch zusätzliche Stabilität. Nachdem der Roboter setzt das «vordere» Bein auf die Oberfläche, Propeller die Drehrichtung ändern, so dass die «vordere» Bein притягивалась und «rear» nach oben gedrückt. Danach wird der Zyklus wiederholt. Der Prozess der Fortbewegung können Sie sehen auf dem Video, unten zugänglich.

Jet-HR1: ein Roboter, der unterstützt das Gleichgewicht mit Hilfe von Propellern
Vladimir Kuznetsov