In December 2016, we wrote about a robot-traceur Salto, which is able to move, Bouncing on an impressive for its height. And now, after months after the release, experts from the Biomimetic Millisystems Lab at the University of California conducted a number of modifications that allowed the robot to control its motion during the jump.
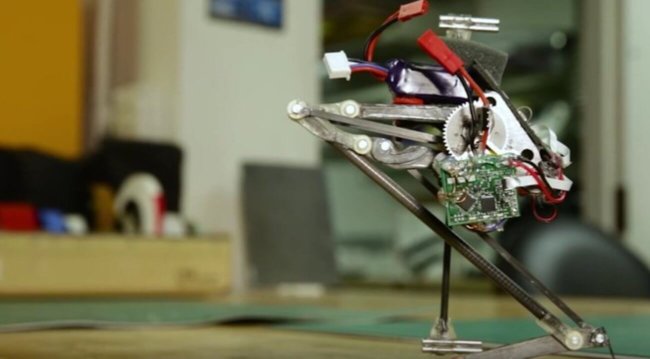
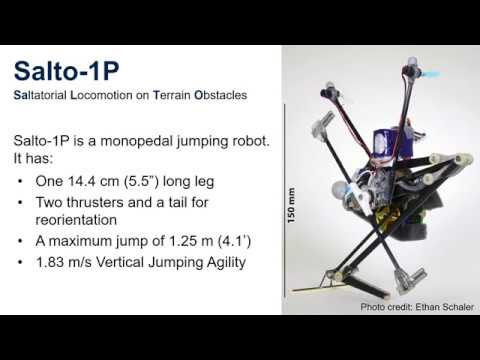
An improved version of the robot has received the name Salto-1P. And control of the trajectory during the flight is made possible thanks to the installation of a number of aerodynamic components. Their presence allows the robot to perform even complex tricks. On Salto-1P has 2 screw propellers, which allow the robot to change the trajectory during the jump. In addition, there are a kind of “tail” — the rod with two counter-weights connected to the motor.
Thanks to all of the above, Salto-1P can not only accurately land after a jump, but also to make the following jump, as if somersaulting. In addition, due to a series of improvements Salto-1P can jump to a height of 1.25 meters, a full meter higher than the record previous version. The speed of the jump has changed so much and is 1.83 meters per second.
The presence of all the mentioned characteristics gave the opportunity for scientists to talk about practical application. It is, first and foremost, search and rescue operations and a variety of reconnaissance missions. For more details, the developers promise to reveal in the framework of the international conference of the IEEE/RSJ 2017, which will be held in late July in Canada.
Robot traceur Salto learned to maneuver in the air
Vladimir Kuznetsov