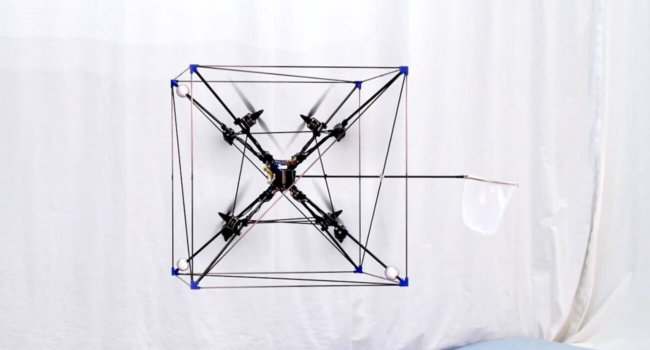
De fleste moderne droner er designet effektivt, hvilket giver dig mulighed for at bevæge sig i en eller to retninger. For eksempel, den sædvanlige placering af skruer i den øverste del af luftfartøjer, der giver et godt løft, men giver dig mulighed for at bevæge sig i en stilling, der er parallel til jorden, der forhindrer “roll-over”, der kan være et stort problem i forhold til den stærke vind. En helt anderledes tilgang anvendes Omnicopter drone, propeller, der er indrettet således, at det apparat, der er lige så effektive til at bevæge sig i enhver retning, og at de faktisk har hverken “top” og “bund”.
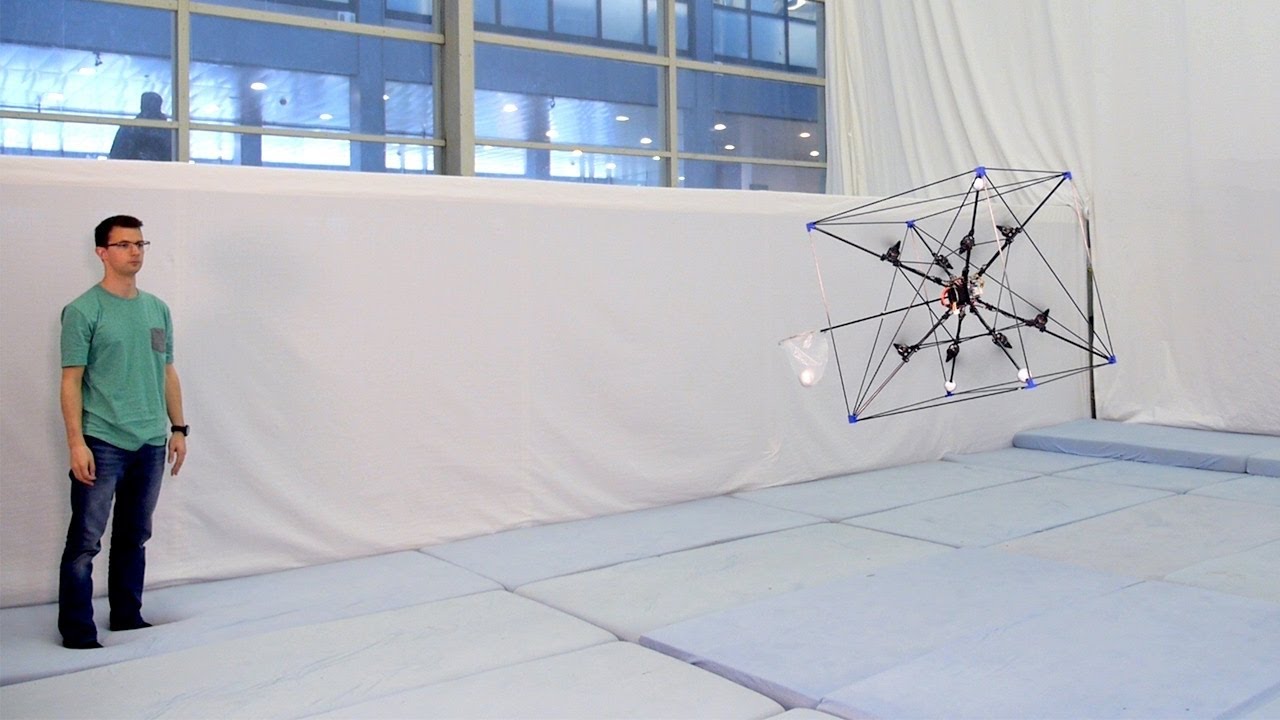
For en vellykket flyvning og udførelse teams har udviklet en særlig software generator bane, der tager højde for alle de parametre, der er af adfærd i luften. 1 sekund PÅ UAV kan foretage beregning af størrelsesordenen 500 000 baner at vælge den bedste og give de relevante kommandoer til motorer af enheden. Denne fremgangsmåde gør det yderst usædvanlige på udkig drone er meget manøvredygtig. For at udvikle ansvarlige ingeniører Dario Brescianini og Raffaello D ‘ andrea fra Schweiziske Føderale Institut for teknologi, der ligger i Zürich.
Swiss technology specialister kan have stor succes inden for luftfart og transport faciliteter, som er let skalerbar og kan anvendes selv i et ret stort fly. Nu til disse formål, “almindelig”, helikoptere og multi-rotor droner, der har meget mindre udvalg af mulige bevægelser. I øjeblikket er det svage punkt er en kompleks manuel kontrol enhed. Mens skaberne, der tager sigte på den størst mulige forenkling og forbedring til at overvåge flyvningen. I øjeblikket er vi ved at udvikle intelligente kontrolsystemer med brug af kameraer med høj opløsning. Deres anvendelse vil gøre det muligt for den UAV til at udføre bevægelser med meget høj nøjagtighed.
Omnicopter: drone, som ikke har nogen “top” og “bund”
Vladimir Kuznetsov