
Att distribuera autonoma mini-rovers kan hjälpa oss att utforska platser dit konventionella sådana inte kan åka.
Av
2 november 2021

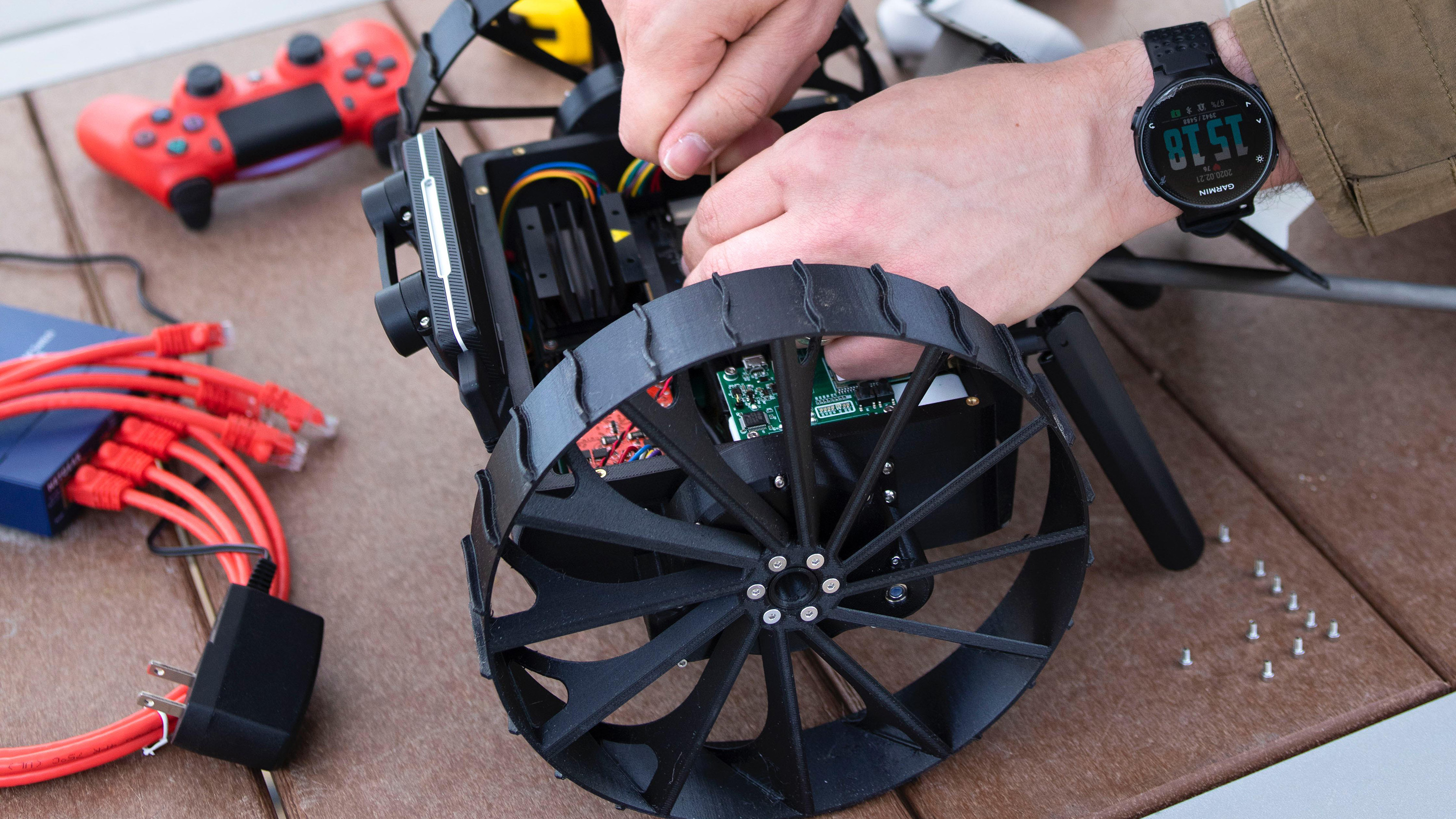 Den autonoma Pop-Up Flat Folding Explorer Robot (A-PUFFER) var en NASA-kampanj för att hjälpa till att utveckla robotar för att scoutområdena på månen. Dess teknologi används nu i ett uppföljningsprojekt som heter CADRE.NASA/JPL
Den autonoma Pop-Up Flat Folding Explorer Robot (A-PUFFER) var en NASA-kampanj för att hjälpa till att utveckla robotar för att scoutområdena på månen. Dess teknologi används nu i ett uppföljningsprojekt som heter CADRE.NASA/JPLNASA undersöker ett koncept för en ny flotta av mini-rovers som kan arbeta tillsammans för att lösa problem och fatta beslut som en enhet. Om en misslyckas eller fastnar någonstans, kan de andra fortsätta utan det.
Som en del av projektet Cooperative Autonomous Distributed Robotic Exploration (CADRE) designar NASA-ingenjörer kompakta, mobila robotar i storleken av en skokartong (som jämförelse är Perseverance storleken på en liten SUV) för att autonomt utforska månen och andra planeter. Dessa rovers kommer att fungera som en grupp för att samla in data på svåråtkomliga platser som kratrar och grottor.
I ett demonstrationsuppdrag som förväntas under de närmaste åren kommer CADRE:s mini-rovers att utforska månens massiva lava rör – områden där det översta jordlagret har stelnat, men lava fortfarande rinner under. CADRE kommer att göra resan ut på en landare innan den kastas ut på månens yta.
“Tanken där är att [om] vi har två eller tre rovers som vi kan skicka, kan en av dem potentiellt gå ner i ett lavarör”, säger Alex Schepelmann, en robotteknik- och beräkningsmodelleringsingenjör vid NASA:s Glenn Research Center. “Och vi skulle i princip veta att den rovern skulle ha svårt att ta sig ut igen.”
Även om rovern inte skulle förväntas komma tillbaka till ytan, säger Schepelmann, kan den fortfarande vidarebefordra information till de andra medlemmarna i gruppen. Så länge rovers kunde kommunicera med varandra kunde uppdraget fortsätta.
Relaterad berättelse
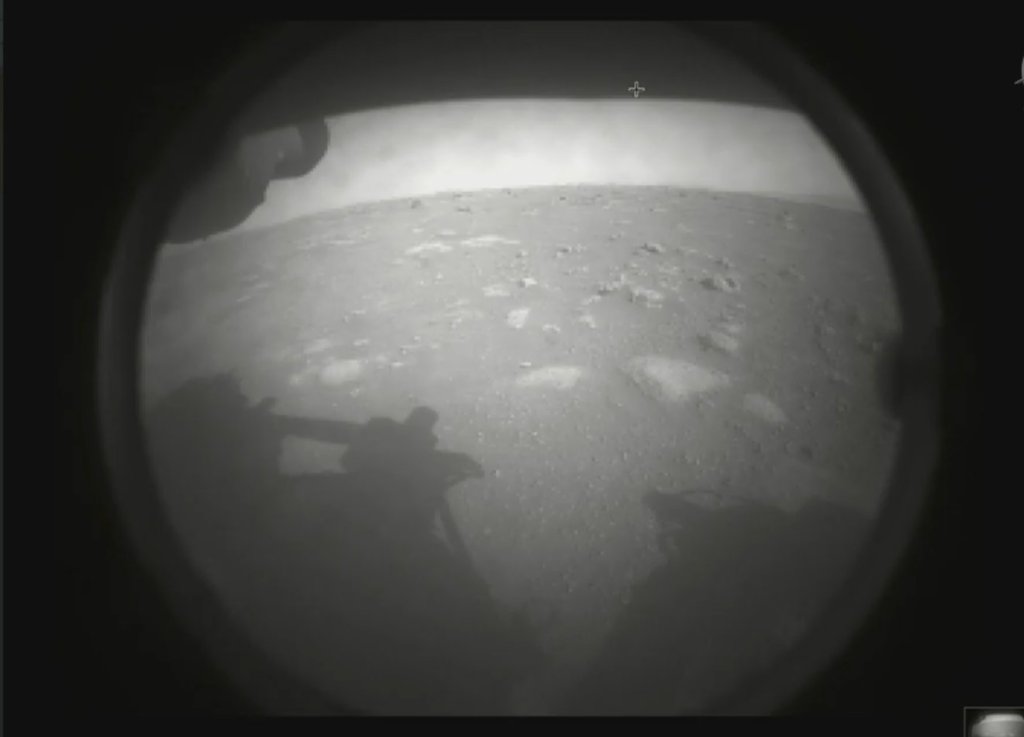 Detta är den första bilden som tagits av NASA:s Perseverance Mars-rover. Nu börjar jakten på livet.
Detta är den första bilden som tagits av NASA:s Perseverance Mars-rover. Nu börjar jakten på livet.
Efter att ha överlevt nedstigningen skickade rovern tillbaka den här bilden från Mars yta.
Ombord kommer varje rover att bära en liten dator, en trådlös radio och en stereokamera för att fånga 3D-bilder. Även om ingen av dem ensam kommer att kunna samla in så mycket data som en större skulle kunna, kan en utplacering av flera samtidigt minska risken för ett katastrofalt misslyckande i uppdraget.
CADRE utvecklades i NASA:s Jet Propulsion Laboratory i Kalifornien och testades av forskare vid Simulated Lunar Operations (SLOPE) Laboratory vid NASA Glenn Research Center i Cleveland. SLOPE är samma labb som testade VIPER (Volatiles Investigating Polar Exploration Rover), en mobil robot som kommer att lanseras i november 2023 och spana efter fruset vatten på månen.
Ett mål med projektet är att förhindra en en upprepning av vad som hände med NASA:s Mars-rover, Spirit, redan 2009 – mardrömmar för rymdutforskningsentusiaster.
En av två tvillingrovers som skickades till motsatta sidor av Mars 2004, Spirit levererade några av de mest detaljerade vyerna av den röda planeten som mänskligheten någonsin sett. Men fem år in i sitt uppdrag fastnade Spirits hjul i mjuk marssand. NASA-ingenjörer arbetade i åtta månader för att få den att flytta, men efter flera misslyckade försök, förvisades Spirit så småningom till tjänst som en stationär vetenskapsplattform.
För att se till att de nya roversna inte fastnar simulerar SLOPE de unika terrängerna de måste navigera, från månens puderiga jord till den steniga Mars-ytan. Forskare använder motion capture-teknik som involverar ett par stereokameror för att skapa tusentals 3D-bilder som används för att mäta varje rovers hastighet och rörelsen hos dess däck, vilket hjälper dem att förutsäga hur marken kan reagera.
“Detta system gör att vi verkligen kan karakterisera dragprestandan”, säger Schepelmann. “Vi kan i princip mäta hur varje del av roboten rör sig.”
Wolfgang Fink, docent i el- och datorteknik vid University of Arizona som studerar autonoma prospekteringssystem, säger att även om rovers som Nyfikenhet och Perseverance hade begränsad autonomi, kommer övergången till full autonomi genom projekt som CADRE att tillåta mänskligheten att utforska områden som vi annars aldrig skulle kunna nå.
I genomsnitt tar kommunikationen bara några sekunder att färdas mellan jorden och månen, men den tiden sträcker sig till minuter om meddelandet måste resa från Mars. Så långt borta som Titan, Saturnus största måne, skulle kommunikationen mellan uppdragskontroll och vilken landare eller rover som helst ta timmar, vilket innebär att alla oförutsedda problem kan sätta hela uppdraget i fara. Ju längre hemifrån vi vill utforska, desto mer autonomi kommer att spela roll.