
The first year the world’s leading experts are being developed in the field of neural interfaces. And recently have succeeded and experts from the artificial intelligence lab Massachusetts Institute of technology (MIT), who were able to control the robot by using brain impulses, and it has been used readily available technology.
The new system is based on the previous design MIT. However, it had a significant disadvantage: to control what an operator would have to “think in a special way”. The person needs to look at certain displays or user interface elements that correspond to certain functions of the robot. Moreover, the system required calibration for each individual and, in General, such control was more complicated life than facilitated.
For a new system of robot control, MIT engineers used the well-known electromyography (EMG) in conjunction with electroencephalography (EEG). Now for control are recorded not only brain waves (as before), but movement of the muscles. As stated by the author of the study Joseph Del Preto AV,
“It is much easier the management process. The combination of EMG and EEG has made the interaction with the robot more intuitive. Locking and muscle movement, and brain waves, we endure the manipulation of human management. This helps to facilitate communication with the robot and make it similar to interaction with a human.”
Remarkably, for the implementation of the ideas scientists have used so-called signals, referred to as a “potential error” (ErrPs). During the work they were generated each time the people gave the robot a single command, and he performed another. People at the same time, like, “thought about how to execute the command correctly”. Due to this, the algorithm was developed, which is based on thoughts about the manipulation of the robot and not on how to “watch the screens”. Read more about the development and management process you can see from the video below.
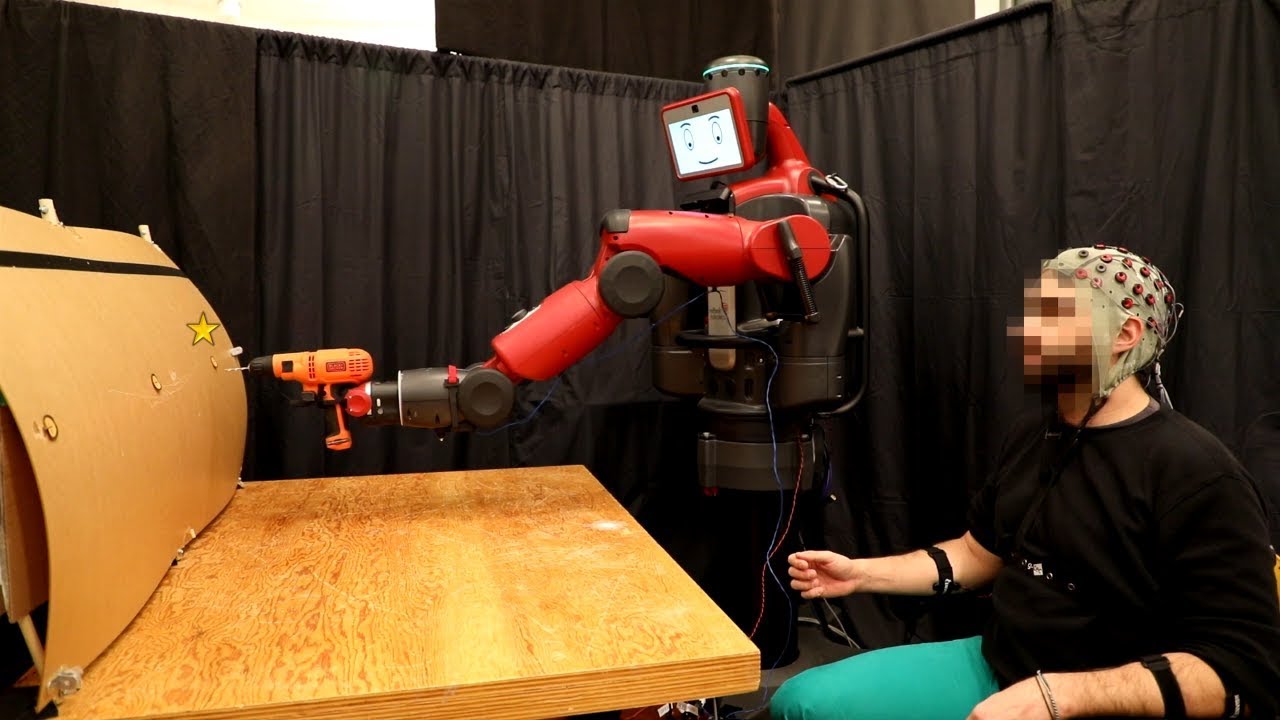
#video | At MIT learned to control a robot using brain impulses
Vladimir Kuznetsov