Franska forskare har skapat en robot som kan navigera utan GPS. Istället kopierar den “navigering” ökenmyror med hjälp av optisk kompass, känslig för polariserat ljus och UV-strålning. Roboten AntBot som beskrivs i den artikel i tidskriften Science Robotics. Pressmeddelande av den utveckling portalen publiceras EurekAlert!

Forskare har länge märkt att ökenmyror söker efter livsmedel som är i stånd att övervinna ett par hundra meter, och sedan tillbaka i en rak linje tillbaka till hans hus av den kortaste vägen, oavsett om de flyttade till detta slumpmässigt. Deras enastående navigering talang bygger på två komponenter: förmågan att beräkna avstånd och reste stegen med tanke på hastighet i förhållande till Solen och biologiska “sky kompass”, som svarar för att polariserat ljus från himlen på marken.
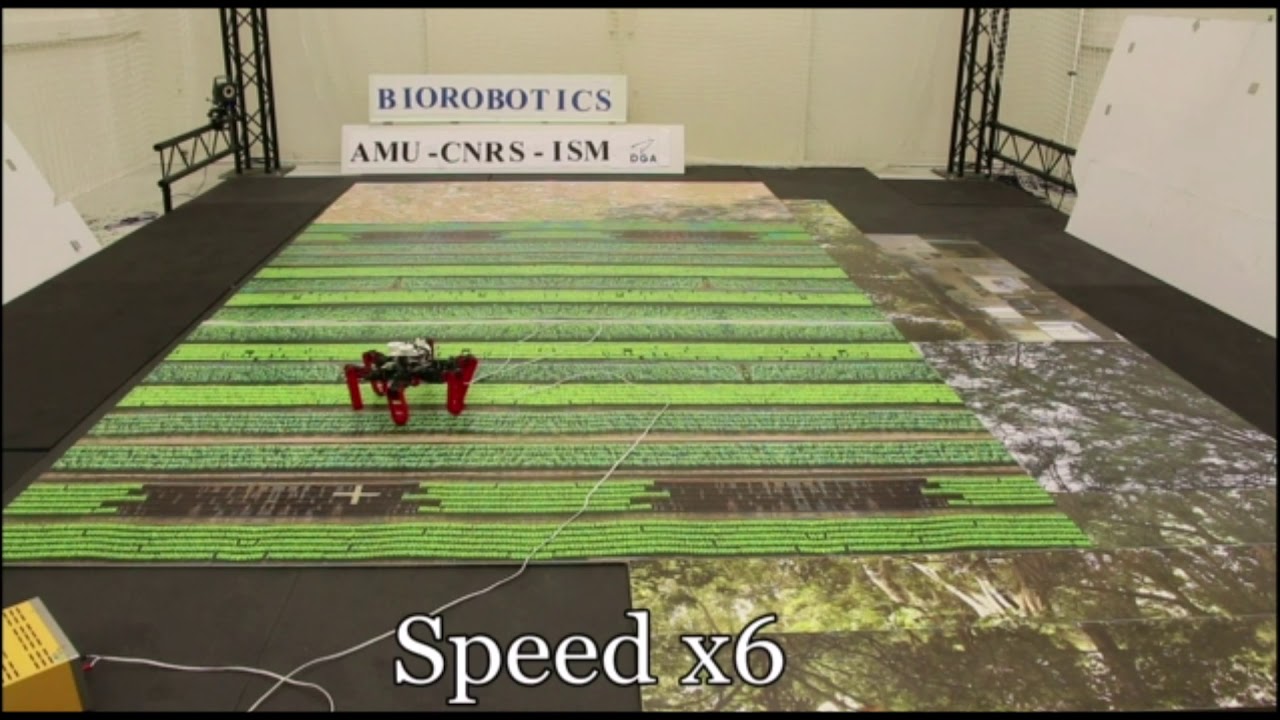
Som utvecklats av forskare vid national center for scientific research i Frankrike (CNRS) och Universitetet i AIX-Marseille (AMU) AntBot roboten väger 2,3 kg, den använder samma metoder. Den är utrustad med sex ben för bättre rörlighet (kan gå genom svår terräng, till exempel, där det inte kommer att robotar och drönare) och utrustade med en mängd sensorer vars uppgifter behandlas av en single-Board datorn Raspberry Pi.

Som en sol kompass, maskinen använder ett par av uv-detektorer, och polarisatorer, rotation som gör det möjligt att mäta fördelningen av polarisering av infallande ljus i himlen som gör det möjligt att bestämma färdriktning. Dessutom roboten har sensorn på den optiska flödet. Det består av två rader med sex sexkantiga pixlar. På grund av förseningen av uppkomsten av bilden på två närliggande pixlar, sensorn kan beräkna optiska flödet.
Med hjälp av dessa enheter AntBot, som ökenmyror, har möjlighet att utforska miljön och att återvända på egen hand för att dess bas med en noggrannhet av en centimeter.

Eftersom utvecklingen är en prototyp, och den har vissa begränsningar. Författarna säger att i experiment bilen har endast cirka 14 meter, därför är resultaten svåra att jämföra med effektiviteten i rörelsen av riktiga myror. Med tanke på storlek, hastighet och tillryggalagd sträcka, roboten ska klara ca 30 mil för att jämföra prestanda med riktiga myror. Så innan du leta efter det potentiella utrymmet, är det nödvändigt att uppnå en ökad rörlighet, författarna lägg till.
För att diskutera utvecklingen i vårt Telegram chatt.