Prototypen bil sikkerhetssystemer er å lære å se på sjåføren, samt veien videre, for å forutsi fremtidige manøvrer mer enn tre sekunder før en driver som gjør dem.

Kjøpe en ny bil i disse dager, og det er store sjanser for at det vil bli utstyrt med en rekke driver-assistanse teknologier. Disse kan matche hastigheten til bilen foran, administrere lane endre trygt, og selv bruke bremsene for å unngå en kollisjon. Så et interessant spørsmål er hvor mye bedre disse sikkerhetssystemer kan bli før det uunngåelige skjer, og bilen tar helt over.
I dag får vi et delvis svar takket være arbeidet til Ashesh Jain ved Cornell University og et par kompiser, som har utviklet et system som kan forutsi et menneske driver ‘ s neste manøvrere rundt tre sekunder før han eller hun gjør det. Denne beskjed, sier de, kan deretter brukes til å identifisere og forebygge ulykker.
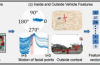
Den tilnærming er enkel i teorien. Jain og co påpeke at en omfattende kunnskap om kjøring miljøet, både inne i og utenfor bilen, kan brukes til å gjøre en ganske god gjette på førerens umiddelbare intensjoner. For eksempel, drivere vanligvis sjekk baner ved siden av dem før du gjør lane endringer. Slik overvåking driver hode bevegelser bidrar til å forutsi om sjåføren har til hensikt å endre baner i løpet av noen få sekunder.
Like, GPS og kartinformasjon viser når en bil nærmer seg et kryss hvor en venstre eller høyre sving bli et alternativ. Og fart er en viktig indikator for siden drivere vanligvis bremse ned før du gjør en sving.
Men disse dataene er ulike. Hode bevegelse data er helt forskjellig hastighet data eller kartdata. Vanskeligheten ligger i å kombinere og analysere denne informasjonen strømmer på en måte som gir gode prognoser for å bli gjort.
Den løsningen som Jain og co har kommet opp med er å analysere disse strømmer sammen ved hjelp av avanserte algoritmer for kunstig intelligens som lærer å se den avslørende tegn på at en manøver som er forestående.
Første del av arbeidet var å samle data som trengs for å trene sin maskin. Jain og co utstyrt en bil med et kamera for å overvåke sjåføren og en annen til å overvåke veien hodet. De har også brukt GPS-data sammen med gatekart og en hastighet logger for å holde oversikt over bilens hastighet.
De samlet inn data fra 10 forskjellige drivere som klokket opp over 1000 miles på motorveien og byen og kjøre over to måneder. De kommenterte data for hånd for å indikere hva manøvrer var forekommende. I sum de identifiserte 700 “events”: noen 300 lane endringer, 130 svinger, og nesten 300 tilfeldig valgt tilfeller av kjøring rett.
De har brukt disse dataene til å trene en rekke ulike tall-knaser maskiner til å identifisere betingelsene for at en sjåfør ville ta til venstre eller høyre, skifte kjørefelt til venstre for høyre, eller bare holde på å kjøre på en rett linje.
Resultatene gir interessant lesing. Den beste utføre algoritmen var i stand til å finne riktig en fremtidig manøvrere mesteparten av tiden—rundt 90 prosent av er spådommer var riktige. Og i gjennomsnitt var i stand til å gjøre sin prediksjon 3,5 sekunder før den manøver som faktisk skjedde.
Selvsagt er det mer arbeid fremover. Et potensielt problem er å finne ut hvor godt algoritmen fungerer i de mest farlige kjøreforhold, særlig om natten eller når sikten er dårlig på grunn av regn eller snø stormer eller når solen står lavt på himmelen.
Ulykker er det mer sannsynlig at under disse forholdene, slik en intelligent algoritme kunne ha mest nytte. Men hvordan systemet utfører under disse forholdene er ikke klart.
Et annet spørsmål er hva man skal gjøre med denne informasjonen når det har blitt samlet inn. Hvordan kan det brukes til å hindre ulykker? Igjen, det er ikke klart hvordan bilprodusenter kan utnytte dataene.
Likevel, det nye tilnærming kan innvarsle en interessant endring i tilnærming til sjåfør sikkerhet. Nøyaktig prediksjon av driver manøvrer vil sikkert bidra til å gjøre bilene sikrere i nær fremtid. Med mindre, selvfølgelig, selv-kjører bil teknologien gjør mennesker og teknologi til å forutse hva de vil gjøre i fremtiden—redundant raskere enn noen forventer.
Ref: arxiv.org/abs/1601.00740 : Brain4Cars: Bil Som Vet Før Du Gjør via Sensorisk-Fusion dybdekunnskap Arkitektur