Folk er forholdsvis let at bestemme massefylde og vægt af emnet, bare ved at kigge på ham. Med samme succes, vi kan sige, hvordan objektet ser ud, bare, at røre ved det med lukkede øjne. Disse evner vil hjælpe robotten til at interagere med objekter, men desværre, de hidtil ikke har været tilgængelige for dem. Forskere fra kunstig intelligens Lab fra MIT (CSAIL) har løst dette problem ved at udstyre en robot-arm KUKA GelSight diskussion sensor — således, kunstig intelligens var i stand til at undersøge forholdet mellem visuel og taktil information, og kombinere dem.

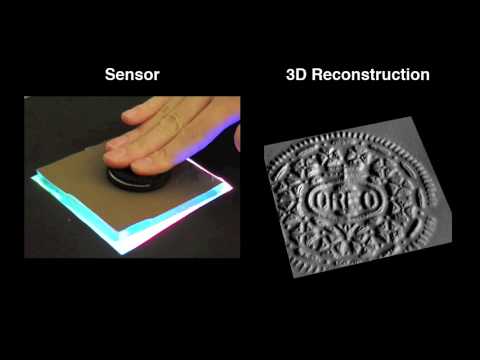
Anvendes GelSight diskussion sensor blev udviklet af en gruppe ingeniører under ledelse af Ted Adelson i 2014. I det væsentlige, det er en elektronisk kopi af spidsen af den menneskelige finger, som til at oprette tre-dimensionelle kort af den overflade du bruger kameraet og en følsom gummi film. Enheden er flere gange blevet testet i virkelige forhold — for eksempel, når han hjalp robot til at kunne forbinde USB-kablet til porten.

Kunstig intelligens kombineret organer af berøring og syn
I det nye projekt sensoren blev monteret på en KUKA robot, og kombineret med kunstig intelligens — og dermed den robotic arm lært øjet til at bestemme nødhjælp, og blinde til at genkende deres form. Learning system der anvendes et sæt af 12 000 videoer med 200 objekter, såsom tekstiler, værktøj og husgeråd. Videoen blev opdelt i rammer, og at der er baseret på dem robotten kombineret taktile og visuelle informationer.
I øjeblikket robotten er i stand til at udføre arbejde i et kontrolleret miljø, og kun med en på forhånd kendt objekter. System udviklere, der ønsker at udvide sin kapacitet, så kunstig intelligens og flere data for at studere.
Ser man på den scene, vores model kan forestille dig følelsen af at røre flad overflade eller en skarp kant. Rørende blindt, kan det identificere formen af objekter udelukkende på taktile fornemmelser. Eu af disse to følelser kan udvide mulighederne for robot-og til at reducere mængden af data, som han kan få brug for at udføre opgaver i forbindelse med at manipulere og gribe objekter, — forklarede Jungju Lee, CSAIL ph.d. – studerende.
Robotter er i konstant udvikling, og på dette punkt endnu ved, hvordan det er at arbejde i et team. For eksempel, der er udviklet på University of California i Berkeley robot kakerlak VelociRoACH for nylig lært at hjælpe hinanden til at stå op. For at læse mere om dette og se videoen i vores materiale.
Hvis du er interesseret i nyheder, af videnskab og teknologi, skal du sørge for at abonnere på vores kanal i Yandex.Zen. Der vil du finde materialer, der ikke blev offentliggjort på hjemmesiden!