Den Leuten ist es Recht einfach, Dichte und Definition des Gegenstandes einfach durch einen Blick auf ihn. Mit demselben Erfolg kann man sagen, wie sieht das Objekt einfach durch berühren mit geschlossenen Augen. Diese Fähigkeiten helfen würden, die Roboter besser interagieren mit den Gegenständen aber, leider, bis jetzt waren Sie Ihnen zur Verfügung. Forscher aus dem Labor für künstliche Intelligenz am mit (CSAIL) haben dieses Problem, stattet den Roboterarm KUKA Tast-Sensor GelSight — also die künstliche Intelligenz konnte sich mit der Beziehung zwischen visueller und haptischer Informationen, und kombinieren Sie.

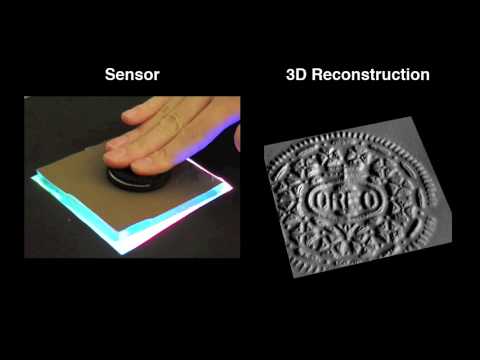
Verwendet taktile Sensor GelSight wurde von einer Gruppe von Ingenieuren unter der Leitung von Ted Adelson de im Jahr 2014. In seinem Kern ist er eine elektronische Kopie der Spitze eines menschlichen Daumens, in dem für die Erstellung von dreidimensionalen Karten der Oberfläche und empfindliche Kamera verwendet Kautschuk-Folie. Das Gerät war schon mehrmals getestet in realen Bedingungen — zum Beispiel, wenn er half, den Roboter richtig verbinden Sie das USB-Kabel an den Port.

Künstliche Intelligenz kombiniert Organe des tastsinnes und der Sehkraft
In einem neuen Projekt Sensor wurde in der KUKA-Roboter, und kombiniert mit künstlicher Intelligenz — so Roboterhand gelernt, auf das Auge zu bestimmen Oberflächenrelief Gegenstände, blind und erkennen Ihre Form. Für die Ausbildung des Systems wurde eine Reihe von 12 000 Videos mit 200 Objekten, wie Stoffe, Werkzeuge und Haushaltsgegenstände. Video zerplatzten personalreferenten, und genau auf deren Basis der Roboter vereint taktile und visuelle Informationen.
Im Moment ist der Roboter in der Lage, die Arbeit nur in einer kontrollierten Umgebung, und nur mit ihm bekannten Gegenständen. Die Entwickler des Systems erweitern wollen, indem Sie künstliche Intelligenz mehr Daten für die Studie.
Blick auf die Bühne, unser Modell vorstellen kann das Gefühl der Berührung auf der flachen Oberfläche oder an einer scharfen Kante. Berühren blind, Sie kann die Form der Objekte ausschließlich durch taktile Empfindungen. Die Kombination dieser beiden Gefühle kann erweitern die Möglichkeiten des Roboters und reduziert die Menge der Daten, die er braucht, um die Aufgaben im Zusammenhang mit der Manipulation und der Beschlagnahme von Objekten, erklärte Юньчжу Lee, ein Student im Aufbaustudium CSAIL.
Roboter werden immer besser und im Moment sogar in der Lage, im Team zu arbeiten. Zum Beispiel, entwickelt an der University of California in Berkeley Roboter-Kakerlaken VelociRoACH vor kurzem gelernt haben, einander zu helfen, aufzustehen auf die Beine. Lesen Sie darüber und sehen Sie sich das Video in unserem Material.
Wenn Sie Interesse an Neuigkeiten der Wissenschaft und Technologie, unbedingt abonnieren Sie unseren Kanal in Yandex.Zen. Dort finden Sie Materialien, die nicht auf der Website veröffentlicht wurden!